锲致智能
请扫描二维码或查找微信公众账号“锲致智能”关注在线官方微信。
Language
首页
产品中心
数控系统
机器视觉系统
工业自动化控制系统
自动化组态定制
行业方案
微电子行业
电路板行业
产线自动化
3C行业
玻璃机械
金属加工
机械手控制系统
技术服务
常见问题
在线留言
售后服务
资料下载
关于锲致
企业概述
新闻资讯
联系我们
员工活动
招聘信息
联系方式
致力于
数控技术、自动化运控技术、机器视觉技术的研发和应用
产品中心
自主研发基础算法
自主的软件开发平台
自主研发基础算法
首页
>
产品中心
>
机器视觉系统
>
自主研发基础算法
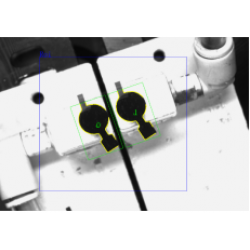
模板匹配
以灰度图像本身或其轮廓作为模板,通过灰度相关,梯度方向相关等算法,准确匹配目标位置,定位精度高于1/4像素。并且可以克服样品平移、旋转、缩放和光照不同所带来的差异。
+阅读更多
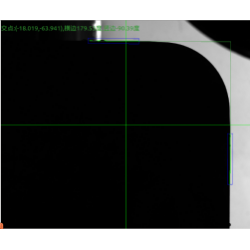
几何定位
以直线,夹角,圆,矩形等几何描述作为模板,通过边缘检测,几何拟合等算法,实现精确定位和测量,精度高于1/4像素。
+阅读更多
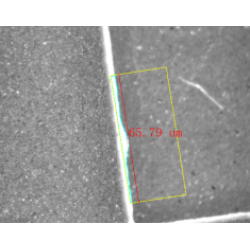
缺陷检测
使用阈值分割,形态学,拓扑学,Blob分析等算法,检测图像中的亮暗缺陷,包括破损,划痕,状物,异物等。
+阅读更多
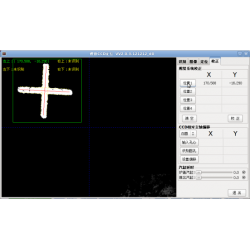
标定与校正
根据具体应用,通过标准块,多点运动,棋盘格的等方式对相机镜头进行标定,减少镜头畸变的影响,实现图像坐标系到机械坐标系的准确转换。
+阅读更多
1/1
|‹
‹‹
1
››
›|



 请扫描二维码或查找微信公众账号“锲致智能”关注在线官方微信。
请扫描二维码或查找微信公众账号“锲致智能”关注在线官方微信。 Language
Language